Halluciguard uses prompt-engineered checker agent ensembles to safeguard against LLM hallucinations, detect false claims made by any other agent, and to rigorously and automatically evaluate and grade work done by agents. It consists of a set of engineered prompts to use LLMs to fact check and detect hallucinations in other LLMs.
When used in an ensemble of agents, it can be used to boost accuracy of information in the network (think of “boosting” but with LLM agents). Useful especially for AI pipelines dealing with healthcare, medical, or bioinformatics data or other domains where misinformation has extremely negative consequences.
The prompts folder contains usable AI prompts for checker agents, which can be ported to any Agentic AI framework — LangChain, Pydantic, AutoGPT, etc.
Example checker prompts current in the repository:
fact_checker.yaml: An agent that checks facts and claims made by other LLMs and evaluates their truthfulness. Built to detect hallucinations by other agents.
general_checker_agent.yaml: An agent that evaluates the work done by an arbitrary agent, given its prompt (including inputs) and produced outputs. Assigns a grade ‘A’-‘F’ to work done and explains the rationale for the grade.
In the early Pokemon card sets (base, jungle, fossil, etc), the weighability of individual booster packs was a well known QC problem. Since holofoil cards are heavier than regular cards (typically by several 0.1g), heavy packs typically had higher odds of containing such a coveted, typically more expensive shiny card. It was thus advantageous to keep such heavy booster packs sealed since they have increasing value over time.
In most recent sets, an extra, variable weight code card was added to each pack to counterbalance and randomize the weight of booster packs. However, social media rumor has it that the code card weight correcting scheme is broken and that Pokemon Scarlet/Violet products are weighable again. This is investigated in a total of 5 products — three Scarlet/Violet booster boxes containing 36 booster packs each and 2 booster bundles containing 6 booster packs each.
To weigh the packs, a KitchenTour Digital Kitchen Scale is used (https://www.amazon.com/dp/B07D7P7MJJ?psc=1&ref=ppx_yo2ov_dt_b_product_details) which has a measurement range of 0.05g-500g with a precision of 0.01g. Given that code cards and packs vary within the 0.1g digit, 0.01g is sufficient to capture most pack weight differences with sufficient precision. The scale was tested to ensure it did indeed have a precision variation only within +/- 0.01g, so all reported measurements have error bars only within that range.
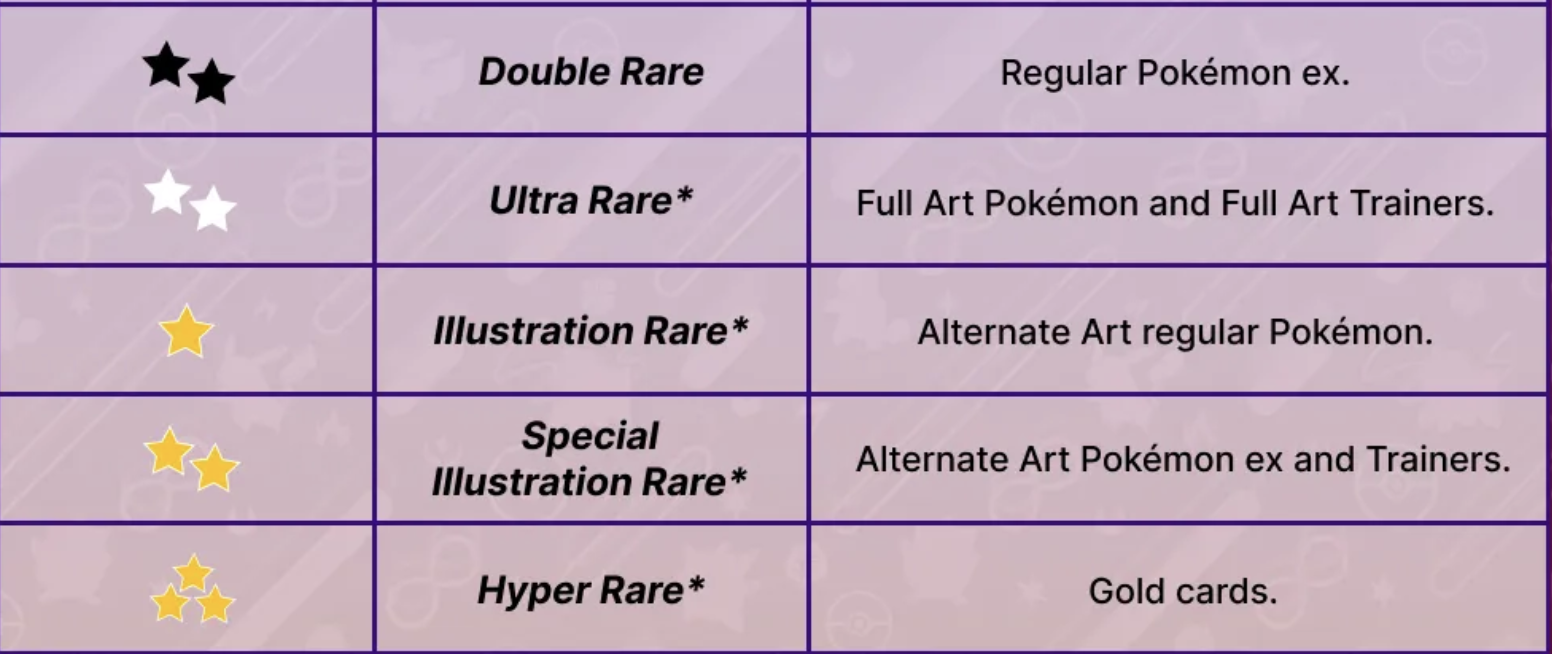
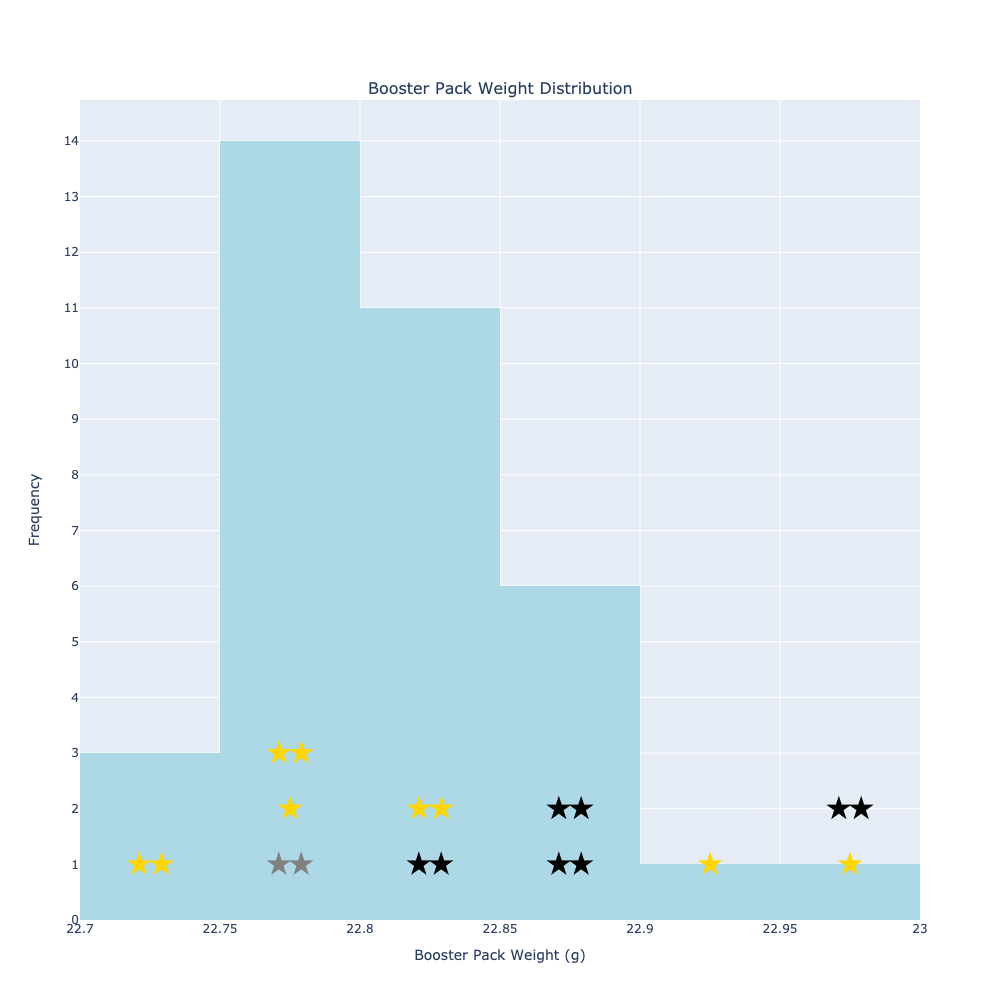
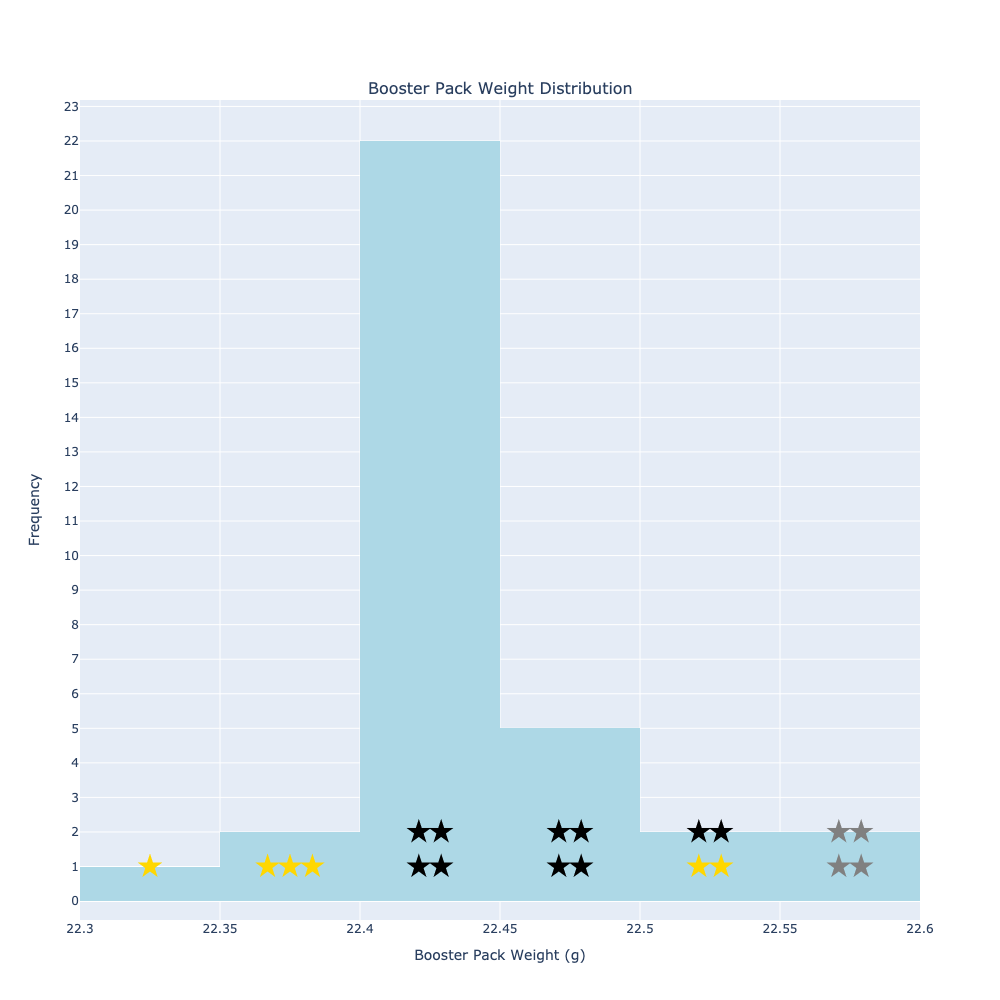
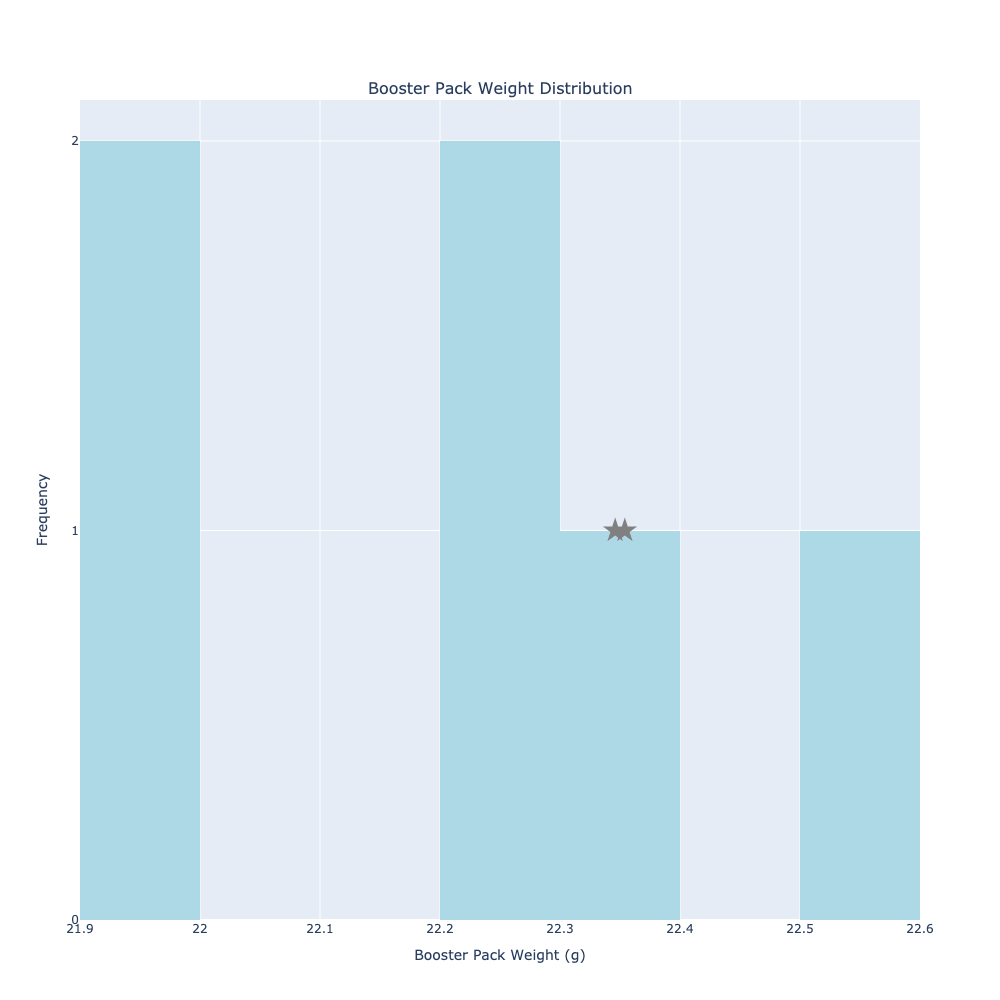
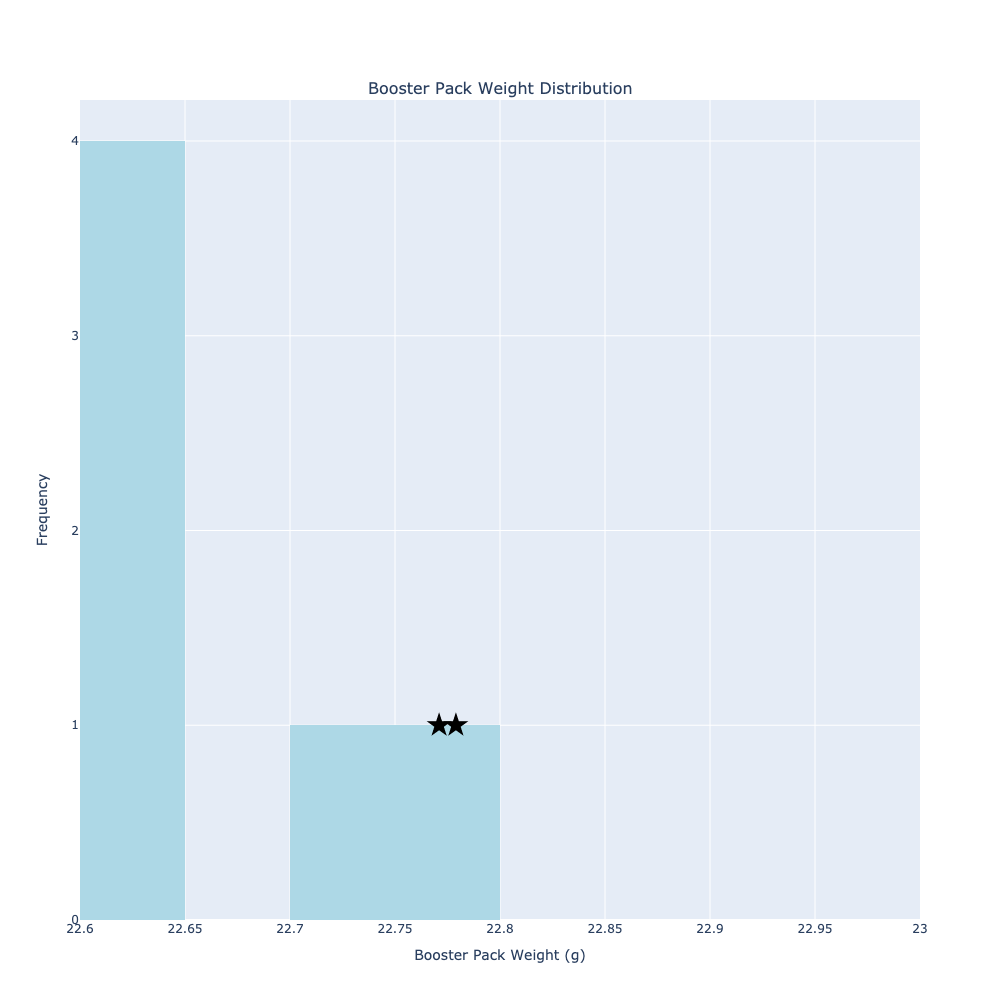
The histograms below show the weight of individual booster packs in the products. At each weight bin, the hits as well as their rarities (shown as colored stars) are stacked. The legend for card rarities is shown below. Since each pack has at least a guaranteed rare (one black star), these are omitted from plotting and only rarities starting with Double Rare are shown.
In general, mean pack weight can vary across products since different products seemingly had differently weighted code cards. However, the heaviest packs (which are typically heavier by at least 0.1g from the average pack) often had significant enrichment of hits.
Booster Box #1:
(No histogram but 3/6 of the “heavy” packs weighing >= 22.9g had hits compared to the average pack 22.85g packs with a 1/6 hit rate)
Booster Box #2:
The two heaviest packs had guaranteed hits, with the heaviest pack having an Illustration Rare and a Double Rare.
Booster Box #3:
The four heaviest packs had hits with 1 double rare, two ultra rares, and 1 special illustration rare.
Booster Bundle #1:
The sole hit fell in the second heaviest pack (though not the heaviest).
Booster Bundle #2:
The sole hit fell within the heaviest pack.
Conclusion: The heaviest packs do seem to be enriched for hits, compared to the average packs. The top 2-4 packs in most of the products typically had guaranteed hits, compared to the average packs which had odds closer to 1/10 which is quite a significant deviation. The findings indicate that QC may indeed be broken in Scarlet/Violet and Pokemon booster packs are weighable again.
Auto-GPT and other such AI bot automation technologies are supposedly coming for all sorts of jobs. AI pioneers are fleeing left and right from the madness they believe they have created and unleashed on the world. But, fortunately, like any AI in any video game, GPTs can be KO-ed by skilled human players. Here are a couple of easy steps you can take to KO Auto-GPT in its tracks.
Implement a bot filter
While Auto-GPT and other similar technologies can execute their own web searches, they are also tripped up by typical bot protections. They are unable yet to bypass basic bot protections like captchas or even sliding a bar to demonstrate that “you are human.”
AutoGPT here was very easily KAPOWED by a very simple bot filter trying to scrape information from a prestigious, top-tier website.
2. Utilize the JRegulate Framework to track GPT usage statistics
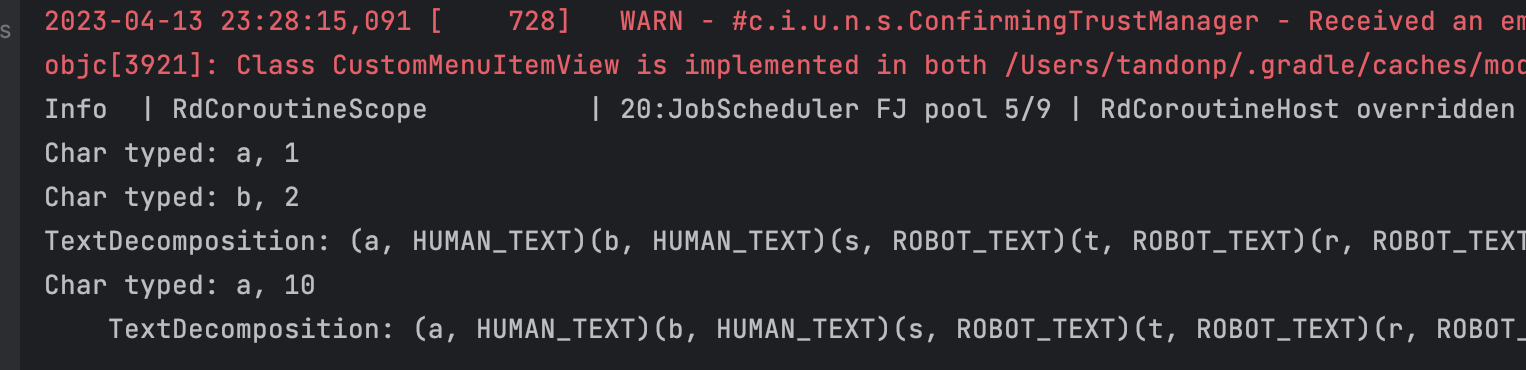
The JRegulate plugin (https://github.com/prateekt/JRegulate) for PyCharm is an example technology that provides a character-by-character decomposition of a text document, identifying the characters that were generated by a human and which were generated by a GPT bot.
Every time the tab key is pressed, the Java plugin identifies what text was autocompleted. Such technologies will be useful in the classroom (for example) to help track text contribution from a student vs. an AI, so a teacher can provide an appropriate grade for the student’s work. This is one of the best ways TO PWN GPT NEWBS.
3. Utilize the JBrain Framework
Auto-GPT is often stuck in thinking loops (shown below). It often repeats actions it has taken before. While Auto-GPT is a step forward in agents, it obviously needs more advanced intelligence to actually be useful.
While Deep Learning enables a significant amount of data cleaning, the JBrain Framework (https://github.com/prateekt/JBrain) can help drive Auto-GPT and other such Deep Learning technologies towards actual Artificial Intelligence. The JBrain framework helps regulate AI and makes it faster so that it does not get stuck in thinking loops. It can terminate AI before it runs amok wasting resources and wasting time.
These are a few ways the Auto-GPT can easily be KO-ed right now, so human civilization is still safe.
It’s been a month long spare time hackathon, but so stoked to release this Pokemon Card Recognizer for the Meta game streaming community using some awesome Computer Vision, Deep Learning, and Robotics tech!
This will help annotation of booster pack opening videos and other such Metaverse gaming experiences. It’s benchmarked quite accurately thus far! I’m so excited to support the dream of professional gaming. Are professional gaming careers actually actualizable by a large percentage of the population in the near future?
By popular demand, I was asked to investigate the origin of the vocal riff in the first 10 seconds of Light’s “Prodigal Daughter” track on the PEP Album.
What is the vocal riff in the first 10 seconds?
At the VIP Q/A at the San Francisco Regency Ballroom concert on 4/6/2022, Lights revealed some details on the vocal riff in Prodigal Daughter.
According to Lights, the vocal riff comes from royalty-free samples that are bundled as part of Apple’s Logic Pro, a popular music production software studio. The vocal riff loop is modified with Logic Pro effects such as Flex Time to create the final sound.
I decided to look into this with my own Logic Pro installation (Logic Pro 10.7.3, macOS Monterey 12.3.1, Macbook Pro 16-in 2021). Upon further investigation, it turns out…
Light’s statement is ACCURATE!
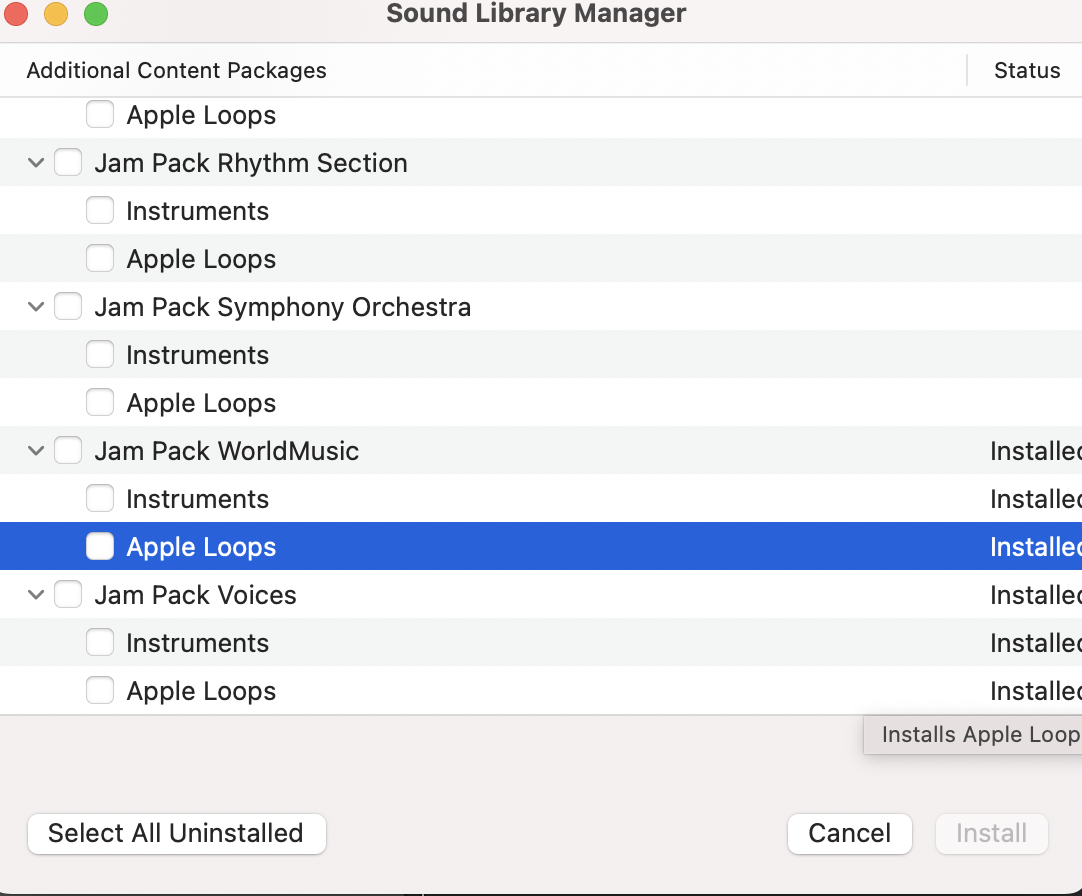
The vocal riff used in Prodigal daughter can indeed be found within the Jam Pack WorldMusic Apple Loops that are installable via the Sound Library Manager as additional downloadable free content.
According to Apple, these samples “may be used on a royalty-free basis to create your own original soundtracks for your film, video and audio projects” (https://support.apple.com/en-gb/HT202939), which is why the Prodigal Daughter production can use use them legally.
The opening vocal riff in Prodigal Daughter is actually not one but likely two free samples stitched together. The closest matches to Prodigal Daughter are the temporal merging of the “Bollywood Lyric 02” and “Bollywood Lyric 08” samples. Here is the raw audio for these samples:
Some other close candidates are “Bollywood Lyric 01” and “Bollywood Lyric 10,” although the vocal pitch and intonation sound too different for these to be the correct hits:
So the raw audio does in fact exist in Logic Pro! Where did these loops come from before they were bundled with Logic Pro?
There are a total of 23 such Bollywood loops (named “Bollywood Lyric 01” – “Bollywood Lyric 23”) in the Apple Jam Pack. The male singer sounds the same in each of the loops, so it is probably the same vocalist in all the tracks. It could be the case that the loops come from one or multiple songs of the original male vocalist’s discography.
To attempt to identify the singer via audio fingerprinting, each of the loops was run through Shazam as well as Google Music’s recognition service for the longer (>2 sec of non-silent audio) loops. In many cases, a recognition result could not be obtained. The results for loops that did process are listed below:
In all cases, the audio snippet had verified usage in some part of the piece, so the recognition results are accurate (and consistently reproducible). However, the results from Shazam and Google Music are heavily biased to recent musical releases in the last 10 years where DJs, EDM musicians, etc are just re-mixing the pre-existing Apple loops. This does not tell us much about the original vocal riff, which was likely created much earlier.
These Bollywood loops are surprisingly popular and widely used! The earliest timestamps of release of the recognized tracks date back to 2010, indicating that the loops have been in Logic Pro for some time. The results from the music recognition services trace the vocal riff back to a widely-released “Bollywood Vocal Ringtone” under the artist name “The Ringtones” that existed in 2010, probably made for flip phones:
This release exists both on YouTube and Spotify under several “albums” which are actually collections of short ~10-30 second mobile ringtones. Each of these collections was released by the artist named “The Ringtones” in timespans ranging from 2010, 2011, and 2012. Here are some of the collection hits on Spotify:
The metadata for the ringtone (which appears to be credible since it exists both on YouTube and Spotify) is:
Provided to YouTube by Kontor New Media Bollywood Vocal Ringtone — Sound Effects Ringtones Greatest Hits ℗ Music4license Released on: 2010-01-18 Artist: Sound Effects Ensemble Composer: Bel Air Music Publisher: Edition Incontro Musikverlag
So the vocal riff used in Prodigal Daughter was previously a freely-distributed Apple loop. This loop came from a mobile ringtone, distributed as far back as 2010 on Spotify and possibly earlier on Pandora, Burnlounge, possibly Napster, and others. Where did this mobile ringtone come from?
Some additional 2012 releases of the Ringtone collection indicate a UPC number which might allow further tracing of the publisher of the ringtone collections in hopes of figuring out where the ringtone was ripped from:
The UPC number search unfortunately did not yield more information. Unfortunately, this about as far as I was able to trace the digital history of the loop.
Having reached a technological dead end with AI, I tried the human crowd-sourcing approach — posting on WhatsApp to a community of 200+ mostly age 60+ Indian relatives and family friends in hopes of receiving a clue. Unfortunately, this did not yield any conclusive results either. The mystery remains unsolved. We may have to crowd-source further.